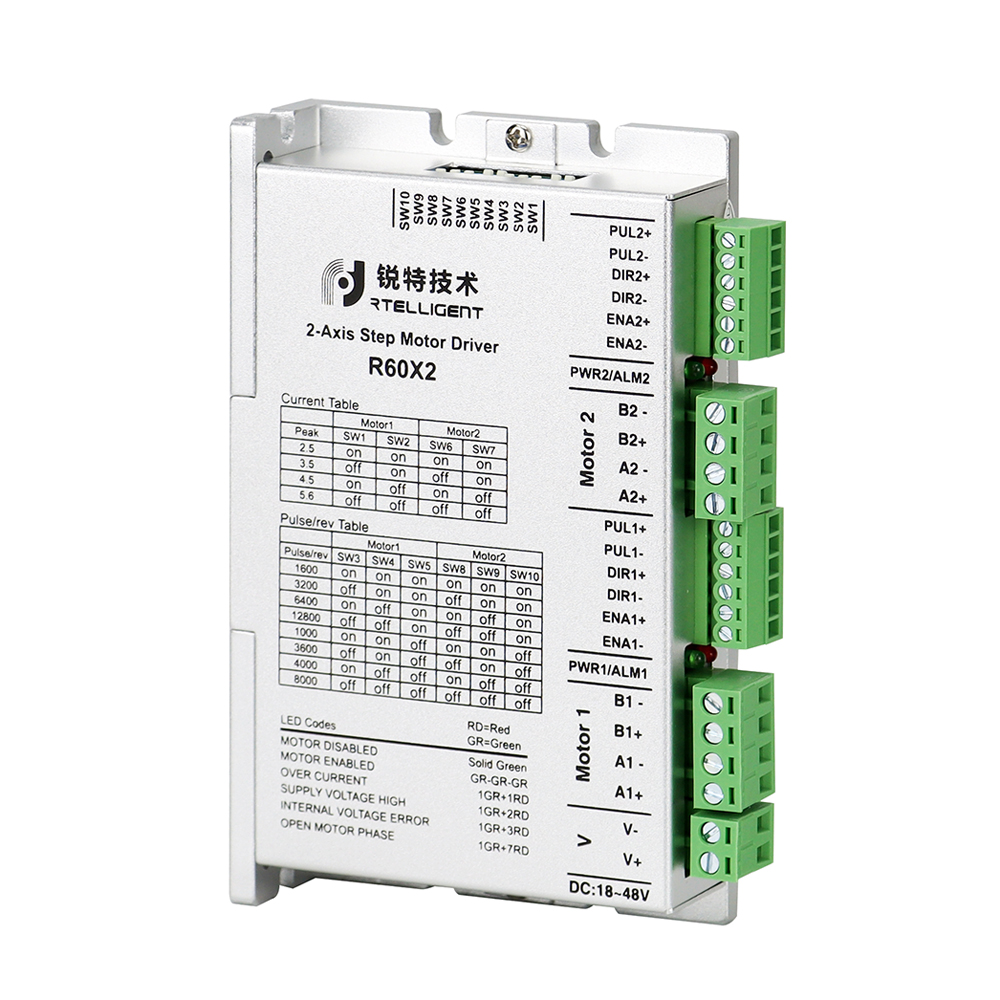




Intelligent 2 Axis Stepper Drive R60X2


ແນະນຳຜະລິດຕະພັນ



ການເຊື່ອມຕໍ່

ຄຸນສົມບັດ
| ການສະຫນອງພະລັງງານ | 24 - 48 VDC |
| ປະຈຸບັນຜົນຜະລິດ | ສູງສຸດ 5.6 amps (ສູງສຸດ) |
| ການຄວບຄຸມປະຈຸບັນ | PID ຂັ້ນຕອນການຄວບຄຸມປະຈຸບັນ |
| ການຕັ້ງຄ່າສ່ວນ | ການຕັ້ງຄ່າສະຫຼັບ DIP, 8 ທາງເລືອກ |
| ຊ່ວງຄວາມໄວ | ໃຊ້ມໍເຕີ stepper ທີ່ເຫມາະສົມ, ສູງເຖິງ 3000rpm |
| ການສະກັດກັ້ນສຽງສະທ້ອນ | ຄິດໄລ່ຈຸດ resonance ອັດຕະໂນມັດແລະຍັບຍັ້ງການສັ່ນສະເທືອນ IF |
| ການປັບຕົວພາລາມິເຕີ | ກວດຫາພາລາມິເຕີມໍເຕີໂດຍອັດຕະໂນມັດເມື່ອໄດເວີເລີ່ມຕົ້ນ, ເພີ່ມປະສິດທິພາບການຄວບຄຸມ |
| ໂໝດກຳມະຈອນ | ສະຫນັບສະຫນູນກໍາມະຈອນ + ທິດທາງ, ກໍາມະຈອນເຕັ້ນສອງ |
| ການກັ່ນຕອງກໍາມະຈອນ | ການກັ່ນຕອງສັນຍານດິຈິຕອນ 2MHz |
| ປະຈຸບັນບໍ່ເຮັດວຽກ | ອັດຕະໂນມັດເຄິ່ງຫນຶ່ງຂອງປະຈຸບັນຫຼັງຈາກມໍເຕີຢຸດ |
ການຕັ້ງຄ່າປັດຈຸບັນ
| axis-1 | axis-2 |
| |||
| ສູງສຸດໃນປະຈຸບັນ | SW1 | SW2 | SW6 | SW7 | ຂໍ້ສັງເກດ |
| 2.5A | on | on | on | on | ຄ່າປັດຈຸບັນອື່ນໆສາມາດປັບແຕ່ງໄດ້ |
| 3.5A | ປິດ | on | ປິດ | on | |
| 4.5A | on | ປິດ | on | ປິດ | |
| 5.6A | ປິດ | ປິດ | ປິດ | ປິດ | |
ການຕັ້ງຄ່າ Micro-stepping
| axis-1 | axis-2 |
| ||||||
| ຂັ້ນຕອນ/ການປະຕິວັດ | SW3 | SW4 | SW5 | SW8 | SW9 | SW10 | ຂໍ້ສັງເກດ | |
| 1600 | on | on | on | on | on | on | ຄ່າປັດຈຸບັນອື່ນໆສາມາດປັບແຕ່ງໄດ້ | |
| 3200 | ປິດ | on | on | ປິດ | on | on | ||
| 6400 | on | ປິດ | on | on | ປິດ | on | ||
| 12800 | ປິດ | ປິດ | on | ປິດ | ປິດ | on | ||
| 1000 | on | on | ປິດ | on | on | ປິດ | ||
| 3600 | ປິດ | on | ປິດ | ປິດ | on | ປິດ | ||
| 4000 | on | ປິດ | ປິດ | on | ປິດ | ປິດ | ||
| 8000 | ປິດ | ປິດ | ປິດ | ປິດ | ປິດ | ປິດ | ||
-
 ຄູ່ມືຜູ້ໃຊ້ Rtelligent R60X2
ຄູ່ມືຜູ້ໃຊ້ Rtelligent R60X2