



Pulse Control 2 Phase Closed Loop Stepper Drive T60Plus


ແນະນຳຜະລິດຕະພັນ



ການເຊື່ອມຕໍ່

ຄຸນສົມບັດ
| ການສະຫນອງພະລັງງານ | 18~48VDC |
| ຄວບຄຸມຄວາມແມ່ນຍໍາ | 4000 Pulse/r |
| ໂໝດກຳມະຈອນ | ທິດທາງ&ກຳມະຈອນ, CW/CCW ກຳມະຈອນສອງເທົ່າ, A/B ກຳມະຈອນສີ່ຫຼ່ຽມ |
| ການຄວບຄຸມປະຈຸບັນ | Servo vector ສູດການຄິດໄລ່ການຄວບຄຸມ |
| ການຕັ້ງຄ່າຍ່ອຍ | ການຕັ້ງຄ່າສະຫຼັບ DIP, 15 ທາງເລືອກ (ຫຼືການຕັ້ງຄ່າຊອບແວ debugging) |
| ຊ່ວງຄວາມໄວ | ປົກກະຕິ 1200-1500rpm, ສູງເຖິງ 4000rpm |
| ການສະກັດກັ້ນສຽງສະທ້ອນ | ການຄິດໄລ່ອັດຕະໂນມັດຂອງຈຸດ resonance ເພື່ອສະກັດກັ້ນການສັ່ນສະເທືອນຄວາມຖີ່ກາງ |
| ການປັບຕົວພາລາມິເຕີ PID | ຊອບແວດີບັກເພື່ອປັບຄຸນລັກສະນະຂອງ Motor PID |
| ການກັ່ນຕອງກໍາມະຈອນ | ການກັ່ນຕອງສັນຍານດິຈິຕອນ 2MHz |
| ສັນຍານເຕືອນ | ຜົນຜະລິດປຸກສໍາລັບ overcurrent, overvoltage, ຄວາມຜິດພາດຕໍາແຫນ່ງ, ແລະອື່ນໆ. |
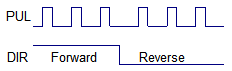
ໂໝດກຳມະຈອນ
ການໂຕ້ຕອບສັນຍານຂອງໄດຊຸດ T ມາດຕະຖານແມ່ນເປັນຮູບກໍາມະຈອນ, ແລະ T60PLUS V3.0 ສາມາດໄດ້ຮັບສາມປະເພດຂອງສັນຍານຄໍາສັ່ງກໍາມະຈອນ.
| ກຳມະຈອນ ແລະທິດທາງ (PUL + DIR) |
|
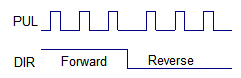
| ກໍາມະຈອນເຕັ້ນສອງເທົ່າ (CW + CCW) |
|
| ກຳມະຈອນທາງຂວາງ (A/B ກຳມະຈອນທາງຂວາງ) | 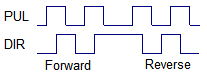 |
ການຕັ້ງຄ່າ Micro-stepping
| Pulse/rev | SW1 | SW2 | SW3 | SW4 | ຂໍ້ສັງເກດ |
| 3600 | on | on | on | on | ສະວິດ DIP ແມ່ນຫັນໄປສູ່ສະຖານະ “3600” ແລະຊອບແວການທົດສອບສາມາດປ່ຽນພາກສ່ວນຍ່ອຍອື່ນໆໄດ້ຢ່າງເສລີ. |
| 800 | ປິດ | on | on | on | |
| 1600 | on | ປິດ | on | on | |
| 3200 | ປິດ | ປິດ | on | on | |
| 6400 | on | on | ປິດ | on | |
| 12800 | ປິດ | on | ປິດ | on | |
| 25600 | on | ປິດ | ປິດ | on | |
| 7200 | ປິດ | ປິດ | ປິດ | on | |
| 1000 | on | on | on | ປິດ | |
| 2000 | ປິດ | on | on | ປິດ | |
| 4000 | on | ປິດ | on | ປິດ | |
| 5000 | ປິດ | ປິດ | on | ປິດ | |
| 8000 | on | on | ປິດ | ປິດ | |
| 10000 | ປິດ | on | ປິດ | ປິດ | |
| 20000 | on | ປິດ | ປິດ | ປິດ | |
| 40000 | ປິດ | ປິດ | ປິດ | ປິດ |
ການຕັ້ງຄ່າ Micro-stepping
ສະຖານີ Drive ໄໝ້ໝົດບໍ?
1. ຖ້າມີວົງຈອນສັ້ນລະຫວ່າງ terminals, ກວດເບິ່ງວ່າ motor winding ແມ່ນ short-circuit.
2. ຖ້າຄວາມຕ້ານທານພາຍໃນລະຫວ່າງ terminals ມີຂະຫນາດໃຫຍ່ເກີນໄປ, ກະລຸນາກວດເບິ່ງ.
3. ຖ້າ soldering ຫຼາຍເກີນໄປແມ່ນເພີ່ມການເຊື່ອມຕໍ່ລະຫວ່າງສາຍໄຟເພື່ອສ້າງເປັນບານ solder.
ປິດວົງຈອນ stepper drive ມີສັນຍານເຕືອນບໍ?
1. ຖ້າມີຂໍ້ຜິດພາດໃນການເຊື່ອມຕໍ່ສໍາລັບສາຍໄຟຕົວເຂົ້າລະຫັດ, ກະລຸນາໃຫ້ແນ່ໃຈວ່າໃຊ້ສາຍຕໍ່ຕົວເຂົ້າລະຫັດທີ່ຖືກຕ້ອງ, ຫຼືຕິດຕໍ່ Rtelligent ຖ້າທ່ານບໍ່ສາມາດໃຊ້ສາຍຂະຫຍາຍສໍາລັບເຫດຜົນອື່ນໆ.
2. ກວດເບິ່ງວ່າຕົວເຂົ້າລະຫັດເສຍຫາຍເຊັ່ນສັນຍານອອກ.
-
 Rtelligent T60PLUS V3.0 ຄູ່ມືຜູ້ໃຊ້
Rtelligent T60PLUS V3.0 ຄູ່ມືຜູ້ໃຊ້




