Pulse Control 2 Phase Closed Loop Stepper Drive T42


ແນະນຳຜະລິດຕະພັນ



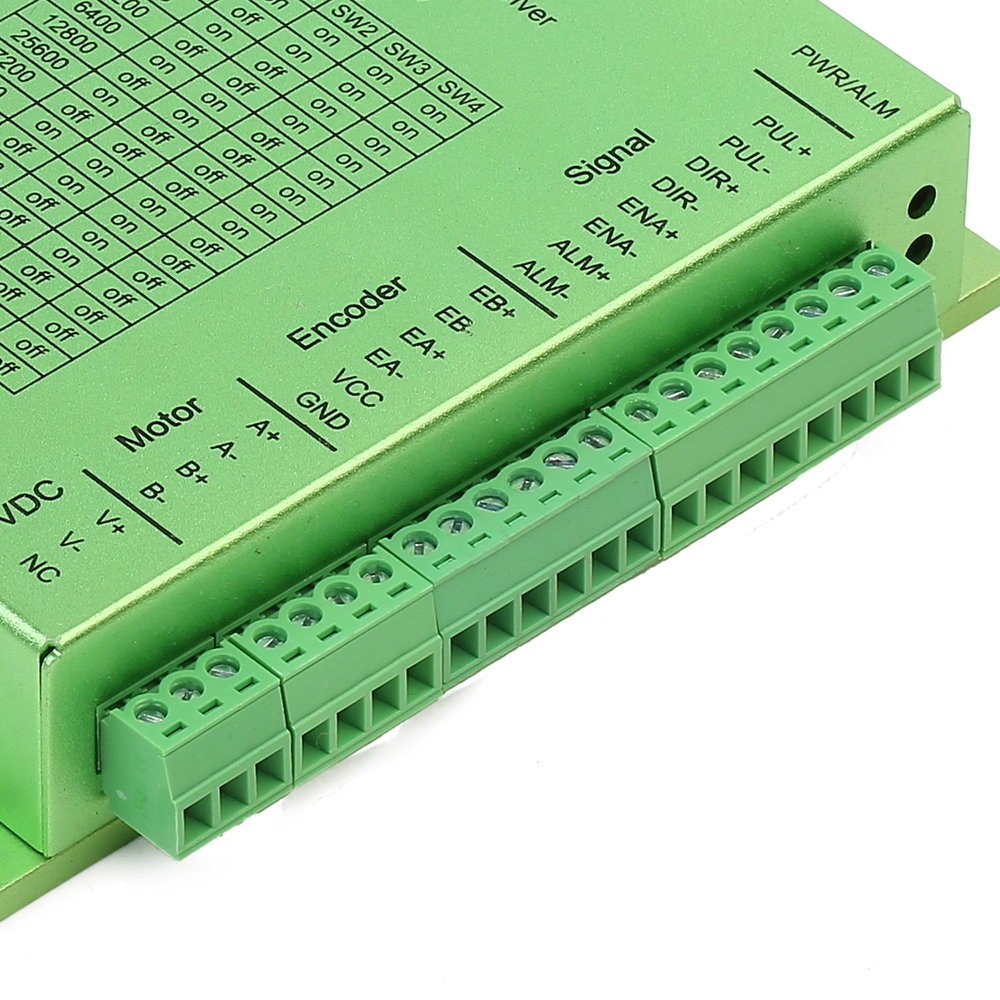
ການເຊື່ອມຕໍ່

ຄຸນສົມບັດ
| ການສະຫນອງພະລັງງານ | 18 – 68 VDC |
| ຄວບຄຸມຄວາມແມ່ນຍໍາ | 4000 Pulse/r |
| ໂໝດກຳມະຈອນ | ທິດທາງ ແລະກຳມະຈອນ, CW/CCW ກຳມະຈອນຄູ່ |
| ການຄວບຄຸມປະຈຸບັນ | Servo vector ສູດການຄິດໄລ່ການຄວບຄຸມ |
| ການຕັ້ງຄ່າຂັ້ນໄດຈຸນລະພາກ | ການຕັ້ງຄ່າສະຫຼັບ DIP, 15 ທາງເລືອກ (ຫຼືການຕັ້ງຄ່າຊອບແວ debugging) |
| ຊ່ວງຄວາມໄວ | ປົກກະຕິ 1200 ~ 1500rpm, ເຖິງ 4000rpm |
| ການສະກັດກັ້ນສຽງສະທ້ອນ | ຄິດໄລ່ຈຸດ resonance ອັດຕະໂນມັດແລະຍັບຍັ້ງການສັ່ນສະເທືອນ IF |
| ການປັບຕົວພາລາມິເຕີ PID | ທົດສອບຊອບແວເພື່ອປັບຄຸນລັກສະນະຂອງ Motor PID |
| ການກັ່ນຕອງກໍາມະຈອນ | ການກັ່ນຕອງສັນຍານດິຈິຕອນ 2MHz |
| ສັນຍານເຕືອນ | ສັນຍານເຕືອນ output ຂອງ over-current, over-voltage, ຄວາມຜິດພາດຕໍາແຫນ່ງ, ແລະອື່ນໆ |
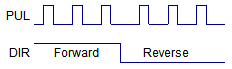
ໂໝດກຳມະຈອນ
ການໂຕ້ຕອບສັນຍານໄດເວີ T series ມາດຕະຖານແມ່ນຢູ່ໃນຮູບແບບຂອງກໍາມະຈອນ, ແລະ T60 ສາມາດໄດ້ຮັບສອງປະເພດຂອງສັນຍານຄໍາສັ່ງກໍາມະຈອນ.
| ກຳມະຈອນ ແລະທິດທາງ (PUL + DIR) |
|
| ກໍາມະຈອນເຕັ້ນສອງເທົ່າ (CW + CCW) | 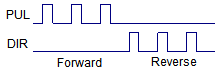 |
ການຕັ້ງຄ່າ Micro-stepping
| Pulse/rev | SW1 | SW2 | SW3 | SW4 | ຂໍ້ສັງເກດ |
| 3600 | on | on | on | on | ສະວິດ DIP ແມ່ນຫັນໄປສູ່ສະຖານະ “3600” ແລະຊອບແວການທົດສອບສາມາດປ່ຽນພາກສ່ວນຍ່ອຍອື່ນໆໄດ້ຢ່າງເສລີ. |
| 800 | ປິດ | on | on | on | |
| 1600 | on | ປິດ | on | on | |
| 3200 | ປິດ | ປິດ | on | on | |
| 6400 | on | on | ປິດ | on | |
| 12800 | ປິດ | on | ປິດ | on | |
| 25600 | on | ປິດ | ປິດ | on | |
| 7200 | ປິດ | ປິດ | ປິດ | on | |
| 1000 | on | on | on | ປິດ | |
| 2000 | ປິດ | on | on | ປິດ | |
| 4000 | on | ປິດ | on | ປິດ | |
| 5000 | ປິດ | ປິດ | on | ປິດ | |
| 8000 | on | on | ປິດ | ປິດ | |
| 10000 | ປິດ | on | ປິດ | ປິດ | |
| 20000 | on | ປິດ | ປິດ | ປິດ | |
| 40000 | ປິດ | ປິດ | ປິດ | ປິດ |
-
 ຄູ່ມືຜູ້ໃຊ້ Rtelligent T42
ຄູ່ມືຜູ້ໃຊ້ Rtelligent T42